Materialien zum Unterricht
Der Arm des Roboters
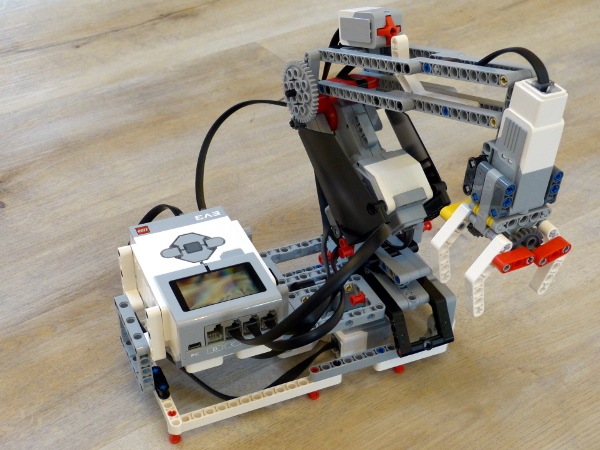
Der Roboterarm wird wie in der Anleitung aufgebaut. Zwei Änderungen sind aber vorzunehmen:
- Der Farbsensor am oberen Teil des Armes ist durch den Berührungssensor zu ersetzen.
- Der EV3-Block ist irgendwie höher anzubringen. Ansonsten sind die Kabel zu kurz.


Nach dem Start des Programms wird der Arm in die Ausgangslage gefahren.
Dazu wird eine Funktion geschrieben, die den Arm zuerst solange nach rechts dreht, bis der Berührungssensor 2 erreicht wird. Der Drehsensor für Motor C wird zurückgesetzt.
Danach wird der Arm nach oben bewegt, bis Berührungssensor 1 erreicht ist und der Drehsensor für diesen Motor ebenfalls zurückgesetzt.
Das Zurücksetzen der Drehsensoren ist notwendig, damit beim späteren Drehen die Motoren nicht zu weit drehen, sondern an einer geeignten Stelle anhalten.

Der Arm ist mit den Tasten zu steuern. Der Arm bewegt sich nur in einem begrenzten Raum.Er wird durch die Berührungssensoren und die Drehsensoren daran gehindert, sich zu weit zu drehen.
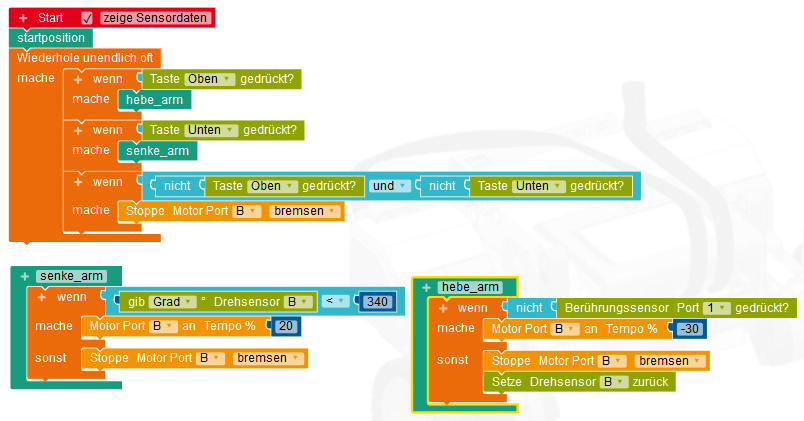
Das Programm steuern durch die Tasten Oben und Unten den Arm hoch oder runter. Wichtig ist die Stelle zum Anhalten des Armes, wenn keine Taste gedrückt ist.
Die Gradzahl für den Drehsensor kann man aus den angezeigten Sensordaten ermitteln.
Es sollte kein Problem sein, die Funktionen drehe_rechts und drehe_links zu schreiben.
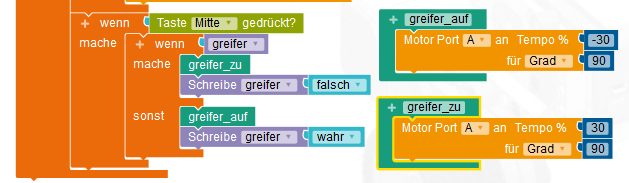
Ist der Greifer geschlossen, kann er nur auf gehen. Ist er offen, muss er nach dem Drüchen auf den mittleren Knopf zu gehen. Der jeweilige Zustand merkt sich der Roboter in einer Variablen.
