Materialien zum Unterricht
Eingesperrt
Ziel: Der Roborter fährt innerhalb der dicken schwarzen Linie. Er stoppt, bevor er über die Linie fahren würde, stößt zurück, dreht sich nach rechts oder links und fährt weiter.
Als erster Sensor wird der Farbsensor angeschlossen. Man hält sich an die vorgegebene Roboterkonfiguration und schließt ihn am Sensoranschluss 3 an.

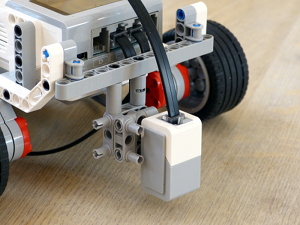
Der Farbsensor wird so am Auto befestigt, dass er etwa in einem Abstand von einer Fingerdicke über dem Boden schwebt.
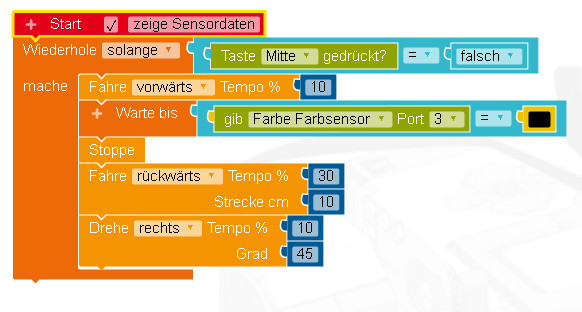
Das erste Programm macht folgendes:
- Es arbeitet solange, bis auf dem EV3 die mittlere Taste gedrückt wird. Damit ist eine Abbruchbedingung vorhanden und das Programm kann ordentlich beendet werden.
- Der Roborter fährt mit der Geschwindigkeit 10 vorwärts. Das wird er solange machen, bis ein anderer Fahrbefehl kommt.
- Er wartet (und führt immer noch vorwärts), bis der Farbsensor den Farbwert Schwarz liefert. Dann hat er die Linie erreicht.
- Der Fahrbefehl wird gestoppt.
- Er fährt rückwärts.
- Er dreht sich um 45° nach rechts.
Wenn nun die mittlere Taste auf dem EV3 nicht gedrückt ist, beginnt die Schleife von vorn, er führt also wieder solange vorwärts, bis die schwarze Linie erreicht wird.
Aufgabe: Nach dem Rückwärtsfahren soll der Roboter einen zufällig bestimmten Winkel zwischen 10° und 45° drehen.
Aufgabe: Die Drehrichtung soll zufällig zwischen rechts und links gewählt werden.
Hinweis: Wenn ein Programm nicht mehr stoppen will, hilft: mittlere Taste und Taste nach unten gleichzeitig drücken!
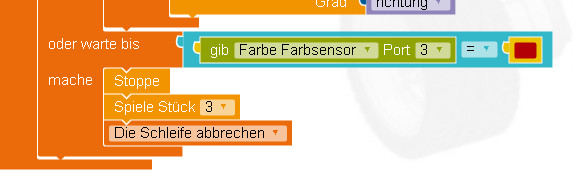
Aufgabe: Der Roborter soll solange fahren, bis er das rote Feld gefunden hat. Dazu ist das Warten in eine Schleife umzuwandeln. Das geschieht über das + neben Warte bis.