Materialien zum Unterricht
Immer an der Wand lang
Eine beliebte Aufgabe für Roborter ist das Folgen eines markierten Weges, z.B. einer farbigen Linie. Egal, wo die Linie langläuft, der Roborter folgt ihr.
Als erstes sieht es noch recht ruckelig aus. Später wird es besser.
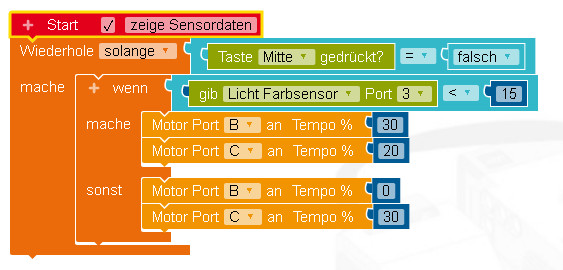
Die Abbruchbedingung für das Programm ist wieder das Drücken der mittleren Taste. Danach wird laufend die Intensität des Lichtsensors abgefragt. Ziel ist es, ihn auf der schwarzen Linie zu halten.
Da er in Uhrzeigerrichtung fährt, muss er immer solange nach rechts fahren, bis er an die schwarze Linie kommt. Rechts fahren bedeutet, dass der linke Motor (Motor C) langsamer dreht als der rechte Motor.
Woran erkennt er die schwarze Linie? Der Lichtsensor sieht schwarz! Das heißt, das reflektierte Licht unterschreitet einen bestimmten Wert, hier den Wert 15.
Ist die schwarze Linie erreicht, dreht er nach links, bis der Sensor wieder Licht sieht. Links drehen heißt: der rechte Motor bleibt stehen und der linke dreht weiter.
Im Prinzip fährt der Roboter die Linie nicht lang, sondern er eiert sie lang. Es ist kein Teil darin, wo er geradeaus fährt.
Aufgabe: Ändere das Programm so um, dass der Roboter entgegen dem Uhrzeigersinn die schwarze Linie langfährt.
Aufgabe: Bisher ist der Roborter immer an der Außenkante der Linie gefahren. Ändere das Programm so, dass er an der Innenkante fährt.
Im nächsten Teil soll Roberta etwas eleganter an der Linie entlanggeführt werden. Dazu ist als erstes zu prüfen, welchen Wert der Helligkeitssensor zurückliefert. Das kleine Programm schreibt auf den Bildschirm den aktuellen Lichtwert. Wie man erkennt, liefert er auf der schwarzen Linie etwa 8-10 und auf der weißen Fläche etwa 90-95. Wenn der Lichtsensor genau über der Kante steht, erhält man einen Wert von etwa 50.
Das heißt, Roberta sollte so gesteurt werden, dass der Lichtsensor immer einen Wert von etwa 50 liefert.

Die Sensorwerte ergeben sich aus dem reflektierten Licht. Im Idealfall ist der Sensorwert genau 50, wenn der Sensor halb schwarz und halb weiß erkennt.
Wenn man den Normalwert mit 50 festlegt, kann man aus dem aktuellen Sensorwert den Fehler berechnen. Ist der Fehler 0, ist alles in Ordnung und Roberta kann gerade aus fahren. Wenn der Fehler positiv wird, kommt Roberta nach rechts vom rechten Wege ab und sollte nach links fahren.
Links fahren bedeutet, dass der rechts Motor schneller als der linke sein muss. Also muss zum rechten Motor bei der Geschwindigkeitsangabe etwas dazugezählt und vom linken Motor etwas abgezogen werden.


