Materialien zum Unterricht
Roberta wächst
Roberta wird mit zwei Hörnern ausgerüstet, die über die Berührungssensoren aufpassen, das sie nicht aneckt. Die Bauanleitung findet man hier:
Das Anbringen der Hörner kann ganz nach Belieben vorgenommen werden. Das Bild zeigt einen Vorschlag.

Zum Vergrößern anklicken

Roberta soll beim Fahren mit dem Ultraschallsensor nach vorn schauen. Erkennt sie ein Hindernis, bleibt sie stehen, schaut nach rechts und links und misst die Entfernung zu den nächsten Objekten. Danach schaut sie wieder geradeaus, fährt ein Stück rückwärts und biegt nach der Seite ab, wo das Objekt am weitesten entfernt war.
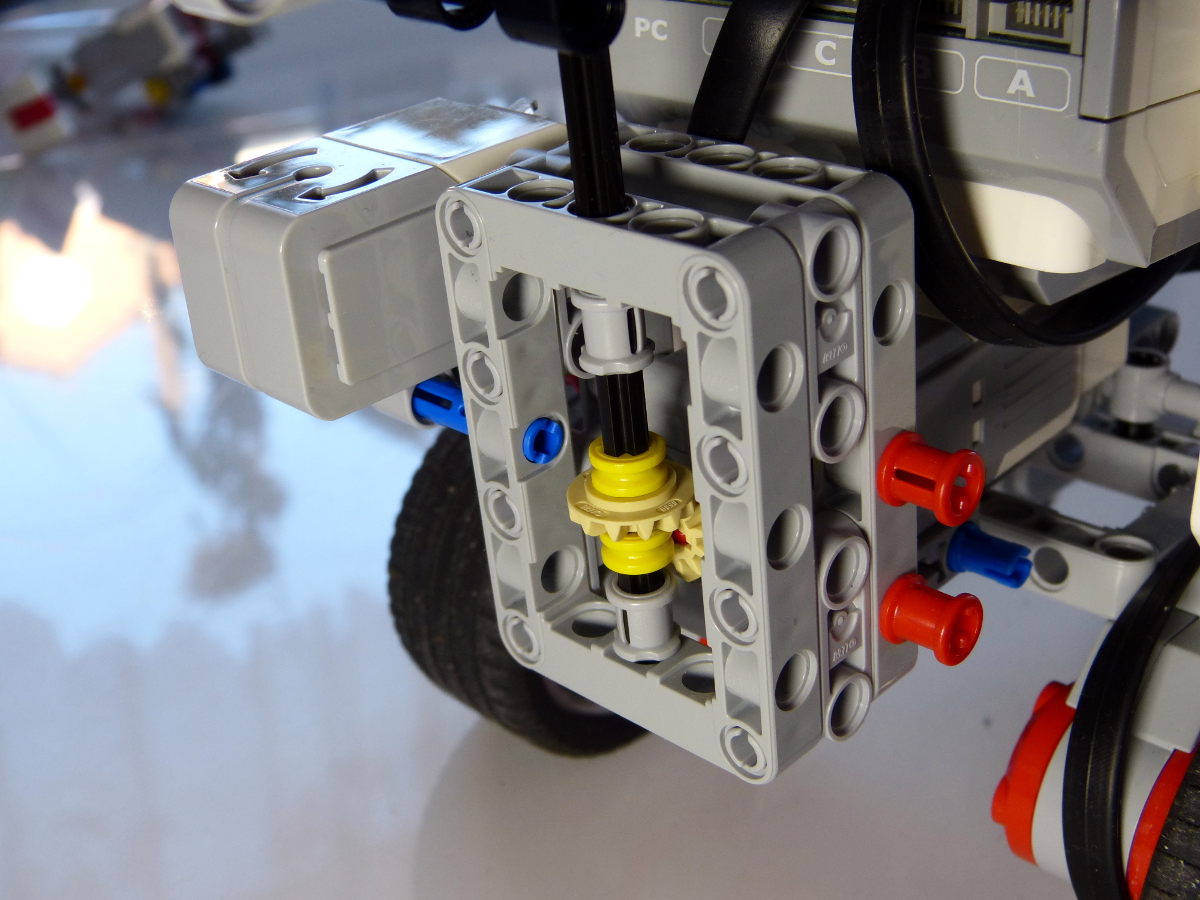
1. Drehen des Kopfes: Der kleine Motor, der den Kopf dreht, ist am Port A angeschlossen. Er schaut nach vorn. Zuerst wird er 90° nach rechts gedreht und Abstand zum nächsten Objekt in der Variable weite_rechts abgelegt.
Danach dreht der Motor um 180° in die andere Richtung. Die andere Richtung macht man durch ein Minus vor der Tempoangabe.
Nach dem Speichern des Abstandes wird der Kopf wieder in die Vorderrichtung gedreht.
Zur Kontrolle werden die beiden Entfernungen ausgegeben.
2. Funktion: Damit das eigentliche Programm übersichtlicher wird, legt man die Blöcke zum Drehen des Kopfes in eine Funktion und ruft die dann einfach auf. Die Funktion heißt kopf_rechts_links.

3. Rechts drehen: Für das Drehen nach rechts wird ebenfalls eine Funktion geschrieben. Nach dem Rücksetzten des Kreiselsensors fährt Roberta ein Stück zurück und dreht dann um 90°.
4. Links drehen: Es ist eine weitere Funktion zu erstelllen, die Roberta nach links dreht.

Das ganze Programm sieht dann so aus.


{kind=link}
{kind=link}
{kind=link}
{kind=link}