Materialien zum Unterricht
Das Grundmodell fährt
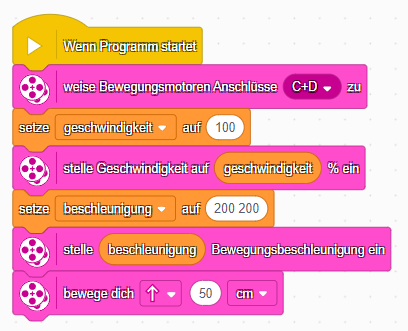
Das erste Programm besteht aus mehreren Teilen:
- Wenn das Programm startet, werden die Motoren eingestellt.
- Eine Variable geschwindigkeit wird erzeut. Sie erhält den Wert 100.
- Die Endgeschwindigkeit für beide Motoren wird auf diesen Wert eingestellt.
- Die Beschleunigung wird in einer weiteren Variablen festgelegt. Die Variable enhält zwei Zahlen, die durch ein Leerzeichen getrennt sind. Jeder Wert kann zwischen 1 und 10 000 liegen. Je höher die Zahl, um so schneller erreicht das Fahrzeug sein Geschwindigkeit.
Der erste Wert bestimmt die Beschleunigung beim Anfahren und der zweite Wert beim Abbremsen. - Die Variable beschleunigug wird in den nächsten Block eingetragen.
- Im letzten Schritt bewegt sich das Fahrzeug um 50 cm nach vorn.
Aufgabe: Ändere die Variable beschleunigung z.B.auf 1000 1000 oder 5000 5000 und beobachte die Bewegung. Die Werte sollten so eingestellt werden, dass das Fahrzeug beim Anfahren und Bremsen nicht ruckelt.
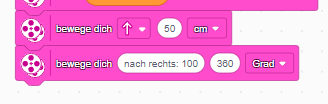
Ziel: Das Fahrzeug soll 50 cm nach vorn fahren und sich umdrehen, zurückfahren und sich noch ein Mal drehen.
Dazu fährt man 50 cm geradeaus und dreht nach rechts. Die 100 legt fest, dass die Drehung auf der Stelle erfolgt.Wählt man eine kleinere Zahl, wird ein Rad weniger bewegt.
Aufgabe: Lasse den Roboter zurückfahren und nochmal um 360° drehen. Er steht dann wieder in der Startposition.
Aufgabe: Das Auto soll 4 mal nach vorn fahren und dann drehen. Verwende dazu eine Wiederhole-Schleife aus der Steuerung. Wenn alles korrekt ist, steht das Auto am Ende der Bewegung fast wieder am alten Platz.

Quadrat fahren
Aufgabe: Ändere den Drehwinkel auf 180° und beobachte, wie der Roboter jetzt fährt.

Ein Achteck fahren
Aufgabe: Ändere das Programm so, dass das Auto ein Achteck fährt, dass wieder zum Ausgangspunkt zurückführt.
