Materialien zum Unterricht
Einfach drehen
Ziel: Es soll eine Funktion geschrieben werden, der man die Richtung und den Winkel übergibt. Der Roboter dreht sich dann um diesen Winkel und bleibt stehen.
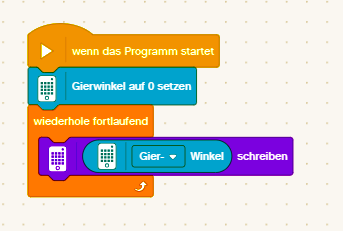
Gierwinkel anzeigen
In einem ersten kleinen Programm wird der Gierwinkel angezeigt. Er wird zuerst auf 0 gesetzt und dann der Roboter um die senkrechte Achse gedreht.
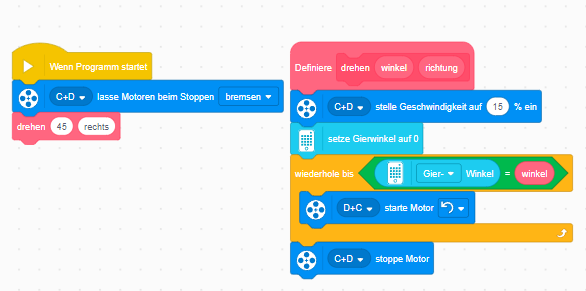
Eine einfache Drehung um einen Winkel
Beim Start soll sich der Roboter einfach um 45° nach rechts drehen. Dazu wird eine Funktion mit dem Namen drehe erstellt. Dieser Funktion wird der Winkel und die Richtung übergeben.
Übergibt man der Funktion den Winkel von 90°, macht der Roboter genau eine Drehung um einen rechten Winkel.
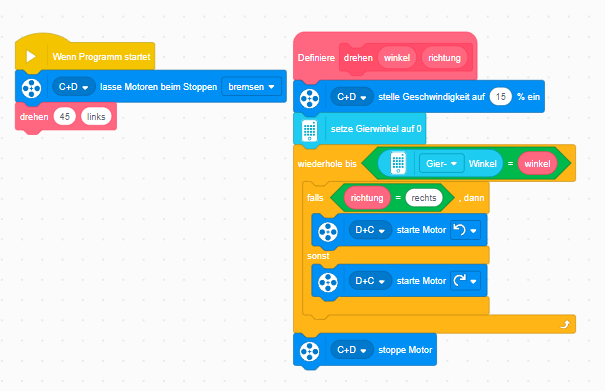
Drehen in beide Richtungen
über die richtung wird der Funktion die Drehrichtung übergeben. Dieser Wert steuert die Richtung, in der sich die beiden Motoren drehen sollen.
Sieht gut aus, funktioniert aber nicht. Der Gierwinkel wird in Linksrichtung negativ gezählt! Das Problem lässt sich beseitigen, wenn man den Betrag des Gierwinkels für die Entscheidung verwendet.

Wenn man den Roboter nun 45° nach links und dann 45° nach rechts drehen lassen möchte, geht das nicht. Er dreht sich zwar in die einer Richtung, aber nicht wieder zurück.
Abhilfe schafft eine kurze Wartezeit nach dem Rücksetzten des Gierwinkels.