Materialien zum Unterricht
Folge der Linie!
einfache Linienfahrt
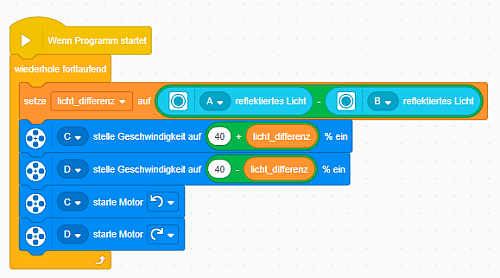
Der Roboter bekommt vor zwei Farbsensoren, die sich etwa ein Finger breit über dem Boden befinden. Aus den beiden Lichtwerten wird die Differenz gebildet. Dieser Wert legt fest, ob der Roboter nach rechts oder links steuern soll.
Man wird aber schnell merken, dass der Roboter nur leichte Kurven schafft. Wenn der Weg zu scharf abbiegt, kommt er nicht mehr mit. Dazu müsste man die Geschwindigkeitsunterschiede zwischen den beiden Motoren größer machen. Dann läft der Roboter aber nicht mehr geschmeidig, sondern ruckelt auf auf geraden Strecken.
intelligente Linienfahrt
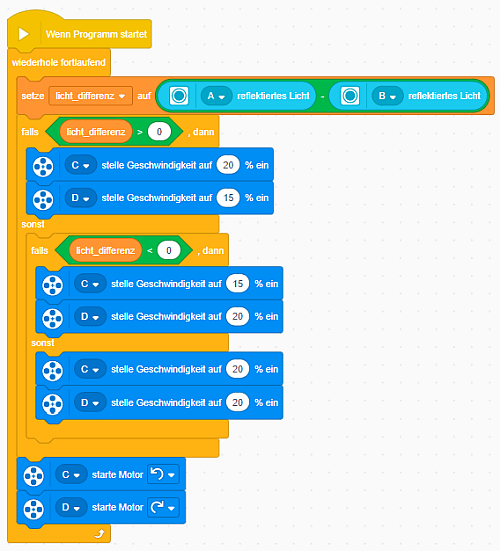
Wenn der Roboter genau auf der Linie fährt, ist die Differenz zwischen beiden Lichtwerten 0 und die beiden Motoren müssen mit gleicher Geschwindigkeit laufen.
Da das aber nie so genau gleich ist, kommt er rechts und links vom rechten Wege ab. Die Differenz wird dann entweder größer als 0 oder kleiner als 0 sein. Die Motoren werden �ber den Differenzwert direkt gesteuert.
Ist die Differenz größer als 0, fährt der Motor C etwas schneller und der Motor D etwas langsamer. Damit dreht der Roboter so, dass er wieder zur Linie findet und die Differenz der beiden Lichtwerte kleiner wird.
Da er bei jeder noch so kleinen Abweichung gegensteuert, ist es keine ruhige Bewegung, sondern mehr ein Ruckeln. Nicht schön, aber er kommt rum.
Etwas besser wird es, wenn die Differenz durch eine Zahl geteilt wird. Im Beispiel wurde 2 genommen. Dadurch verringert sich die Ruckelei. Nimmt man eine gr��ere Zahl verliert der Roboter die Linie, bei einer kleineren ruckelt er wieder mehr.

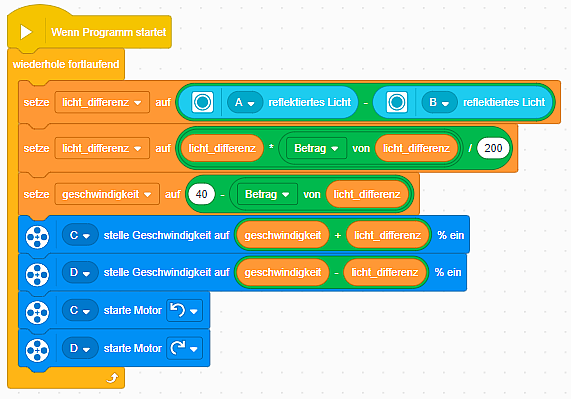
Deutlch besser wird es, wenn der Korrekturfaktor mit größer werdender Abweichung erheblich größer wird. Bei kleinen Abweichungen soll also nur wenig korrigiert werden und mit größeren Abweichungen viel stärker.
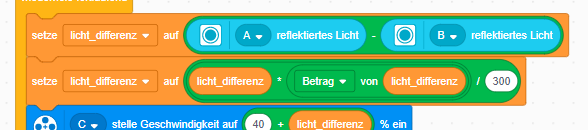
Das erreicht man durch eine quadratische Anpassung. Der Differenzwert wird mit sich selber multipliziert, also das Quadrat gebildet. Damit das Vorzeichen erhalten bleibt, ist der zweite Faktor der Betrag der Lichtdifferenz.
Bei kleinen Differenzen ist das Quadrat noch klein, z.B. bei 4 erhält man 16. Ist die Differenz doppelt so gro�, also 8, erhält man durch die Multiplikation schon 64.
Da der errrechnete Zahlenwert nun wieder zu groß ist, wird er nach dem Quadrieren durch 300 geteilt. Diese Zahl muss experimentell ermittelt werden. Einfach dran rumspielen.
Für den Fall, dass auch scharfe Kurven zu bewältigen sind, muss die Geschwindigkeit dort noch herabgesetzt werden. Das Programm stellt einen Vorschlag dar. Die Zahlen sind durch ausprobieren noch zu verändern